Delta Robot
Delta robots look really cool in action and they are useful for doing stuff. Wikipedia article: [Delta robot].Model
March 25, 2010To move the end effector to a required location in 3-D space, the set angle of all 3 servo motors has to be found from the location of end effector. This is a simple case of inverse kinematics that can be solved analytically. Here is my attempt to summarize all of the necessary math: To prove the ideas, I wrote a simulation program. Besides verification, it is also useful for finding optimal bone lenghts, base and effector dimensions and possible joint angles. It can also be used to estimate working area based on known parameters of existing hardware.
The simulation is written in Processing.js.
- Delta Robot Simulation full size with helpful hints and source code
To be continued...
Some drawings
March 27, 2010



To be continued...
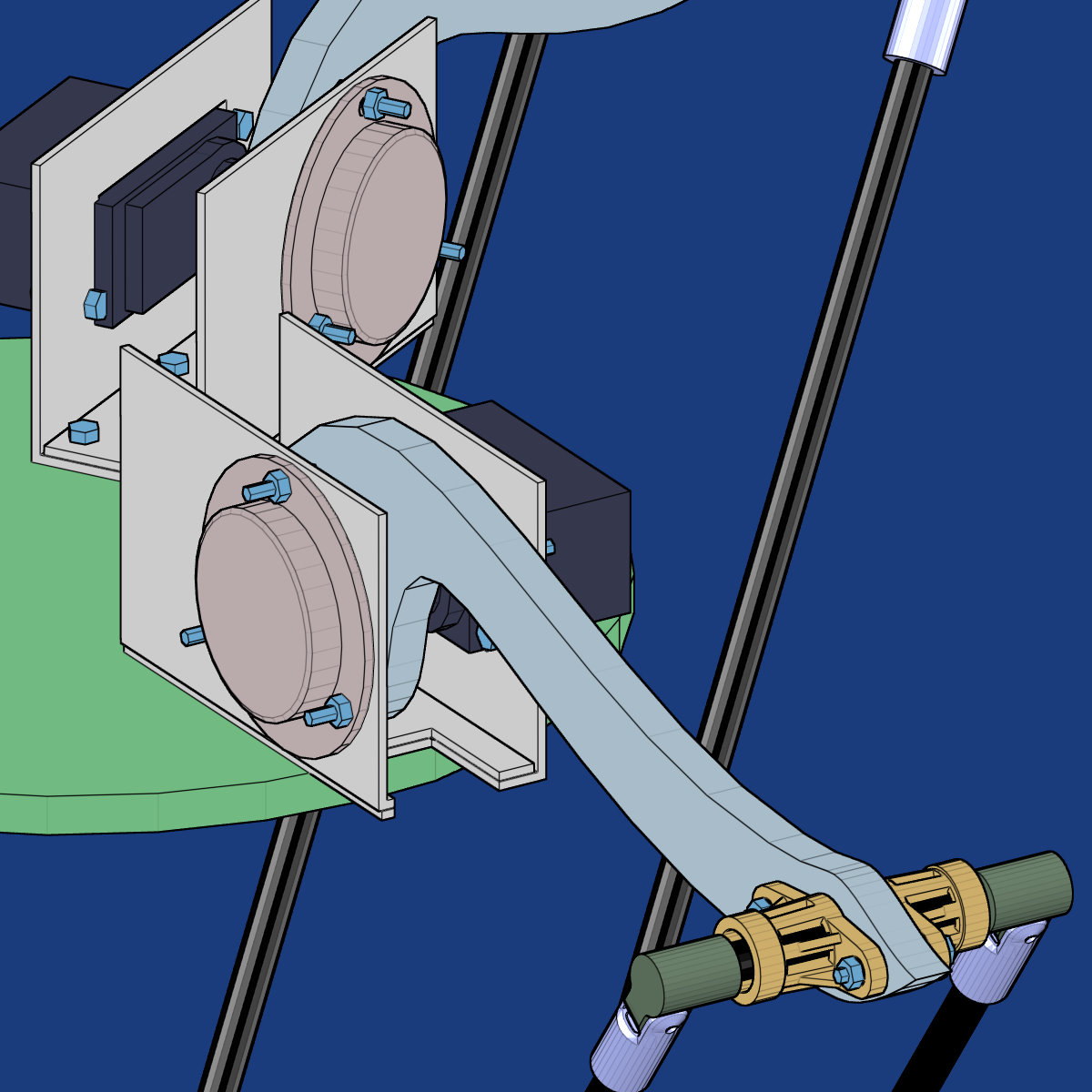
A few more parts
April 8, 2010
Hip bones cut out from plywood, one fitted on the HDD spindle.

Parts 3D-printed by Shapeways from my designs.
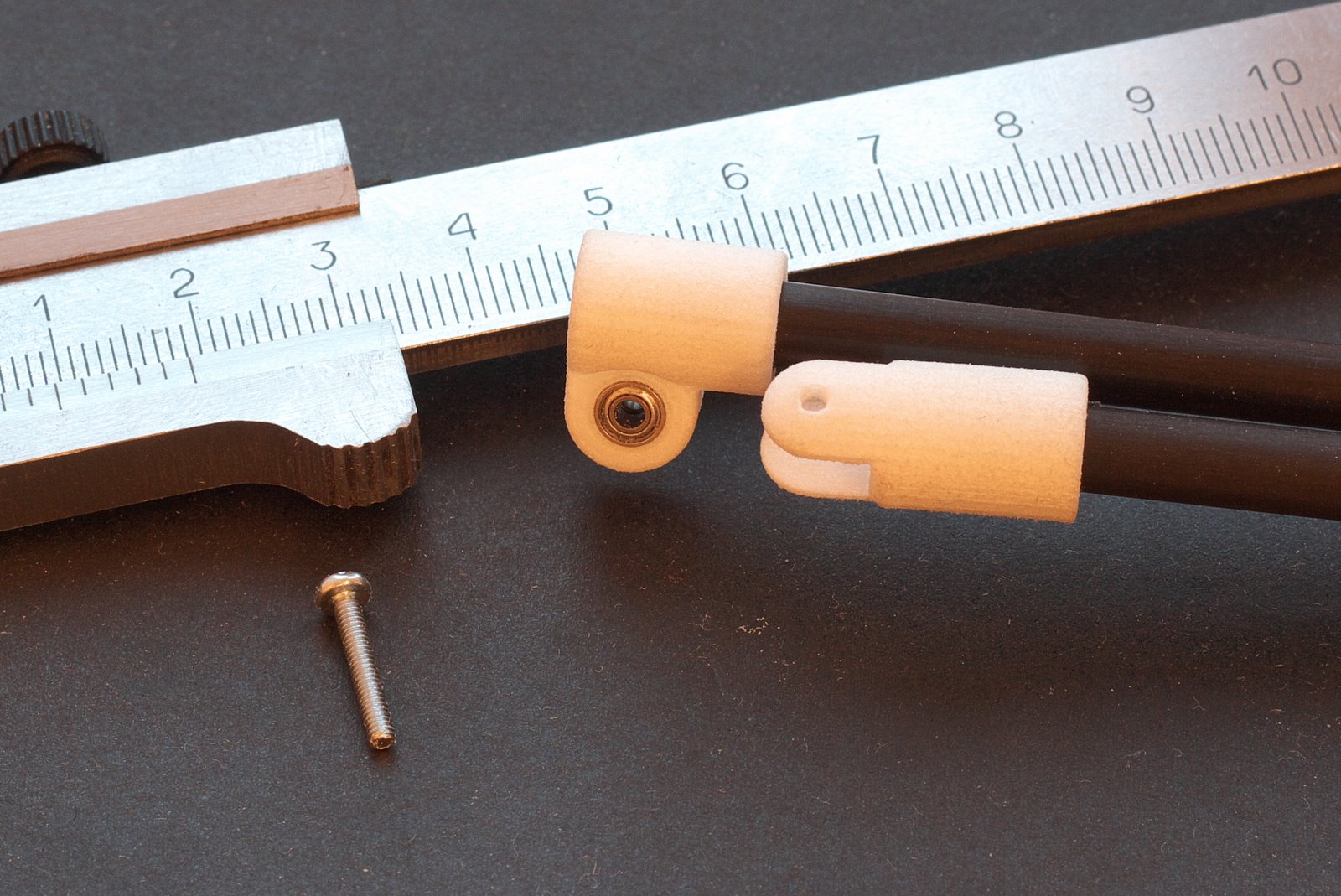
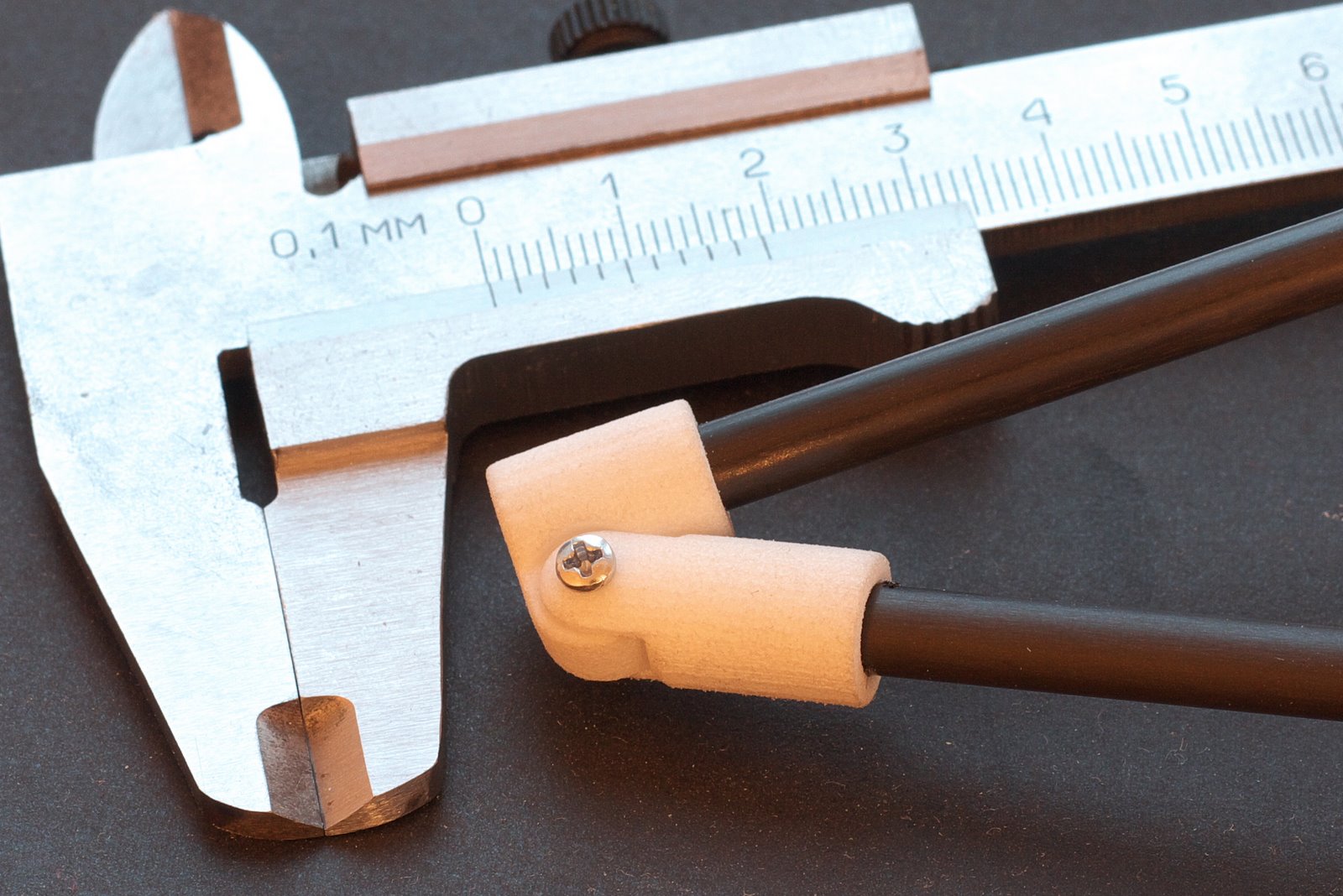
Piecing together
August 19, 2010End effector, knee joint, whole



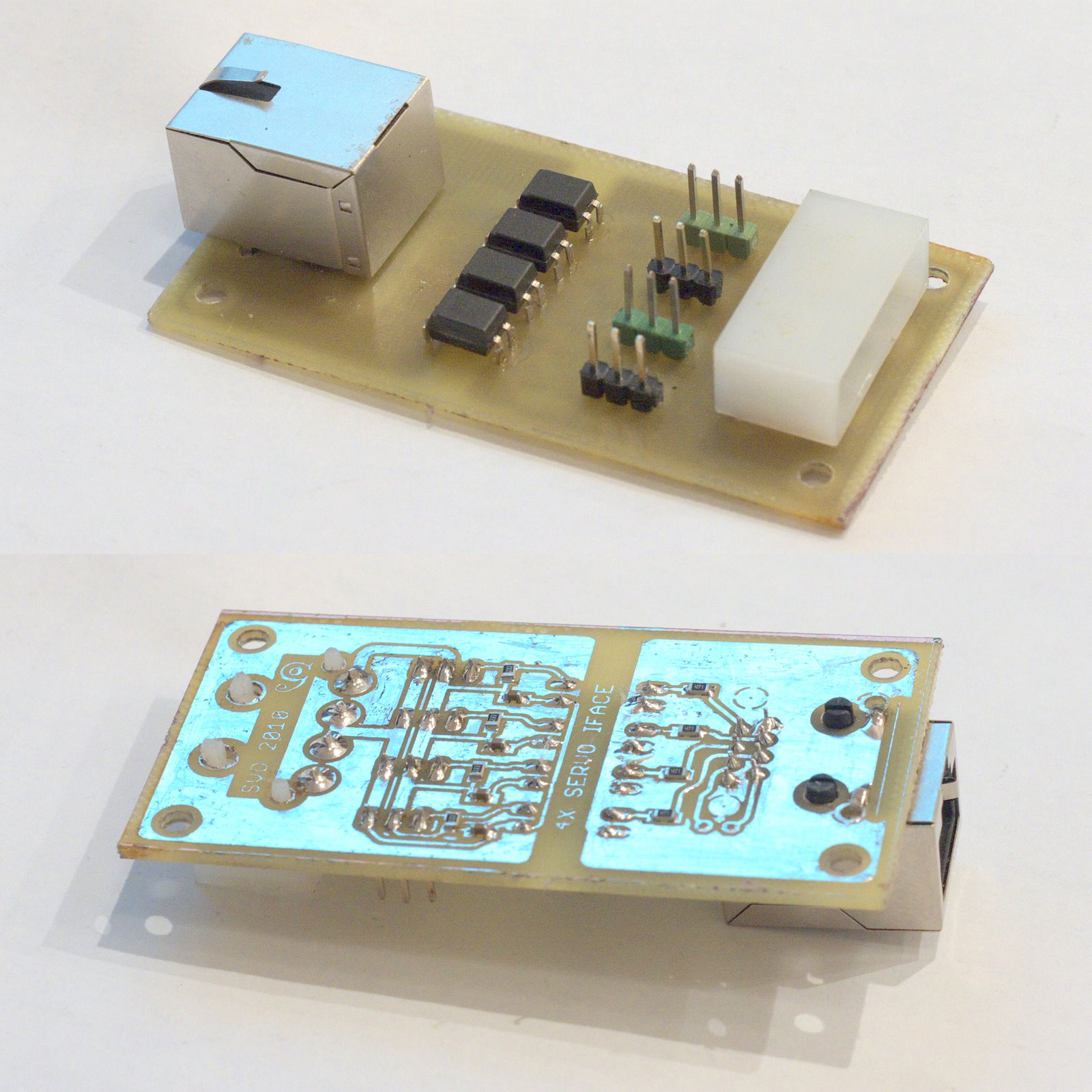
Optocouplers for careless interfacing, servo calibration, all together

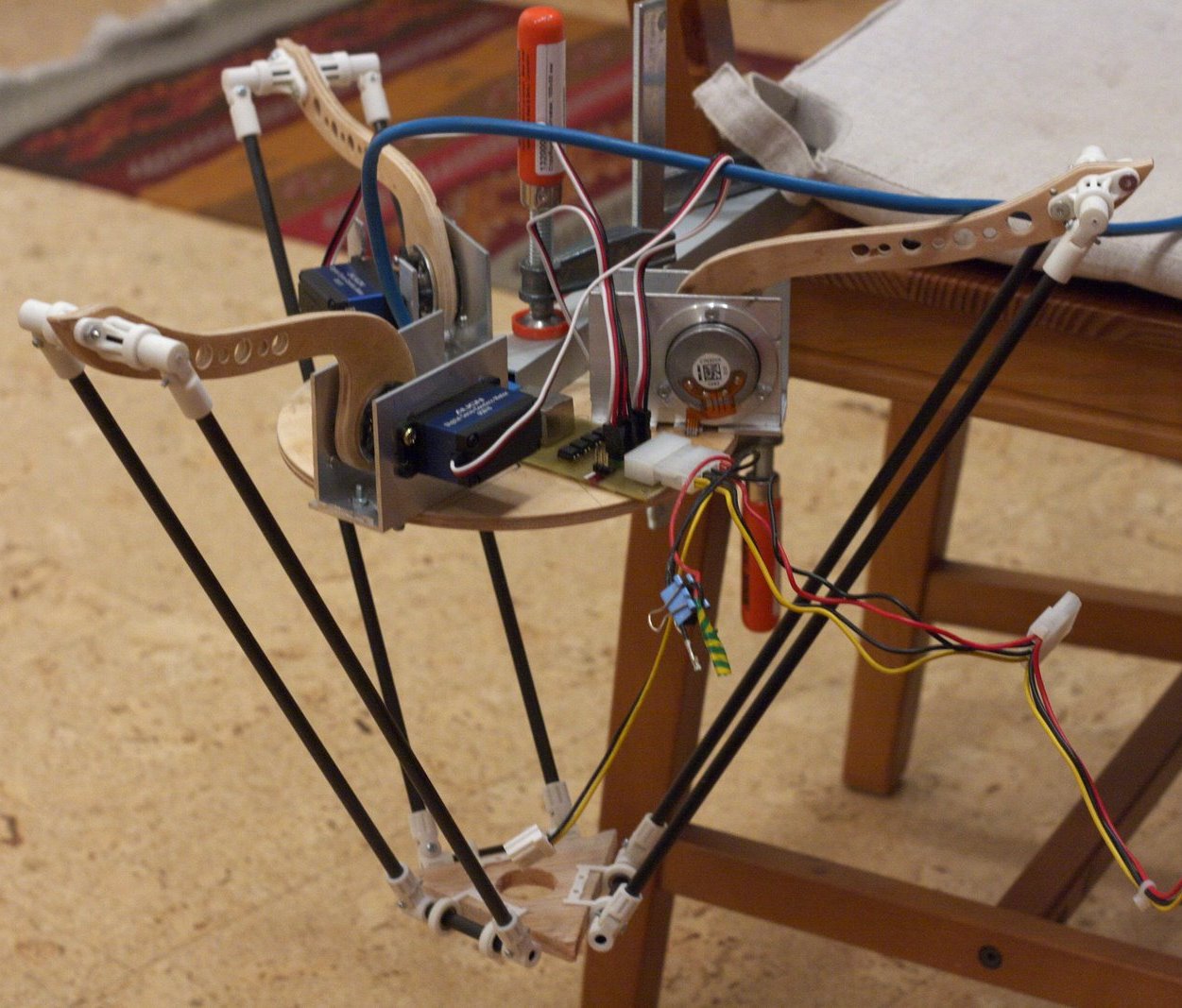
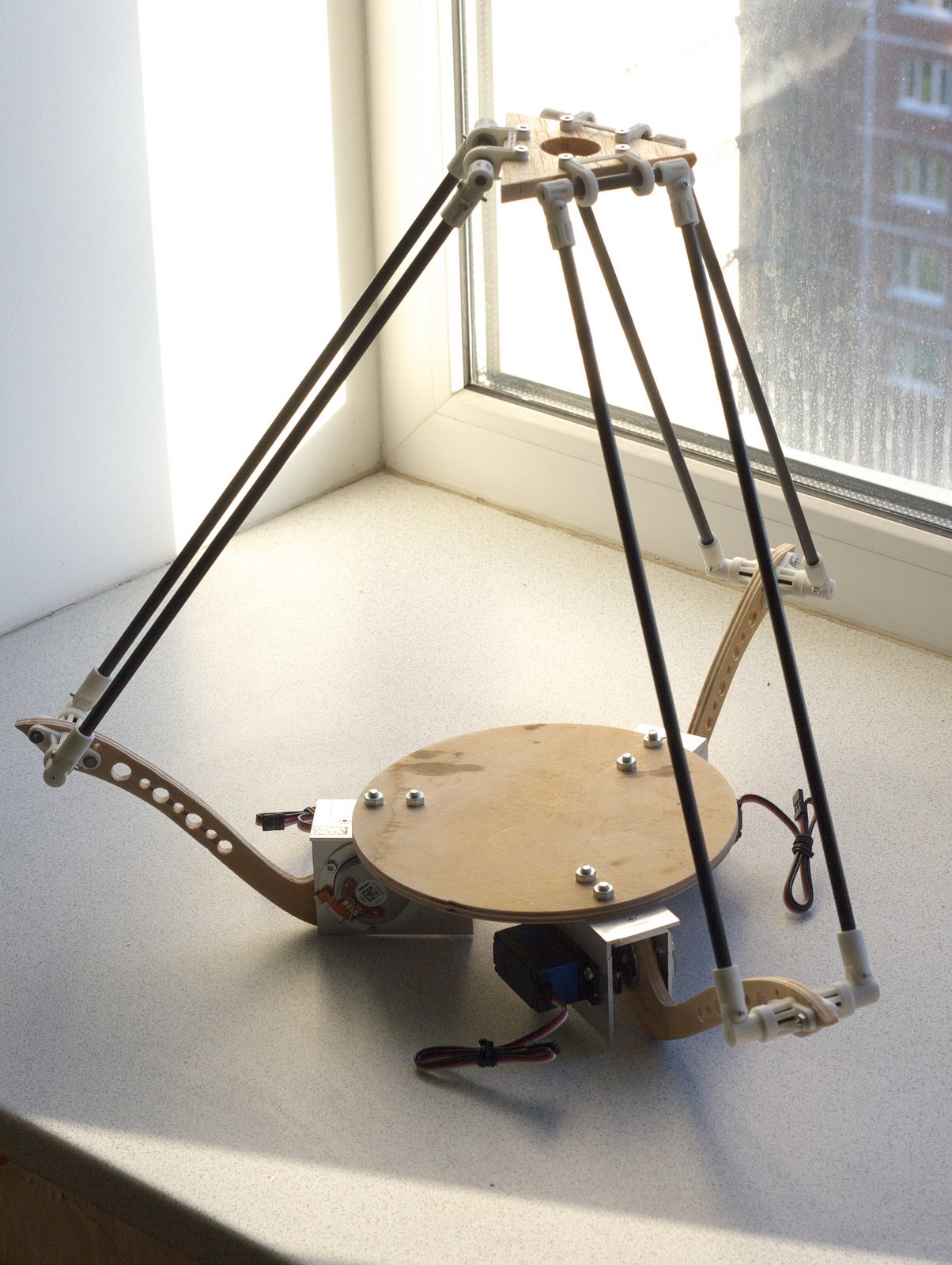
It's alive!
scalpels sold separately
To be continued...
—-—
Address of this page: https://caglrc.cc/dbot/
All Rights Reserved
Copyright © 2010 Viacheslav Slavinsky svofski on gmail
Thu Sep 29 12:48:59 UTC 2016